Conversion au numérique (guidage automatique et CCDs)
L'adaptation au numérique semble nécessaire aujourd'hui pour l'astronomie amateur. Les résultats affichés sur de nombreux sites internet sont surprenants par leur qualité et donnent l'envie d'essayer... C'est une mutation qui est cependant coûteuse (minimum: un ordinateur assez récent, une webcam, un télescope motorisé sur les deux axes et une liaison internet), exige un minimum de compétences en informatique et demande ensuite beaucoup de temps (et d'expertise) pour traiter les images. Nous décrivons ici nos premiers pas dans ce nouveau monde en espérant que cette page rendra service à d'autres ``bricoleurs'', qui disposent comme nous d'un télescope fabriqué avec des moyens modestes, et qui désirent pouvoir le piloter par ordinateur.
Adaptation d'un de nos télescopes au guidage automatique
1. Motorisation des deux axes
L'utilisation de "webcams"
ou de caméras CCD refroidies semble très
attractive, mais elle nécessite une motorisation des deux
axes (déclinaison et ascension droite), au moins pour le
guidage (rendu nécessaire par la rotation de la Terre). Nous
avons exclu le pointage automatique (= "go-to")
des objets à partir d'un ordinateur, car il faudrait installer
des codeurs sur chaque axe, revoir la mécanique en profondeur
(roue dentée et vis tangente) et utiliser des moteurs pas à
pas puissants. Si on veut vraiment du "go-to", nous pensons
que le plus simple est d'amener le cher télescope de notre
jeunesse à la décharge (sniff..., sniff...), et d'en
acheter un nouveau, entièrement piloté par
micro-processeur (c'est une solution plus simple, ... mais la facture
est plus élevée!).
Notre télescope
installé sur une monture à berceau, disposait d'un
entraînement motorisé en ascension droite par secteur
lisse et vis sans fin. Le rattrapage en déclinaison était
manuel (lui-aussi avec un secteur et une vis sans fin). Le suivi en
ascension droite était effectué par un moteur
synchrone, noté M_alpha Les rattrapages se
faisaient à l'aide d'une raquette équipée de
deux boutons, vitesse lente et rapide. Nos réglages
conduisaient à des variations de la vitesse du moteur
d'environ 20%, ce qui est à peu près le maximum que
l'on peut obtenir avec un moteur synchrone. Le pilotage de ce moteur
se faisait par un générateur de fréquences basé
sur un oscillateur NE555 équipé d'une capacité C
et d'une résistance R. La variation de la
résistance R permet l'ajustement de la fréquence
1/RC de pilotage du moteur synchrone (50 Hz étant
la fréquence nominale).
Pour rendre possible un guidage
automatique, il était donc nécessaire d'installer un
moteur sur la vis de rattrapage en déclinaison. Par souci de
simplification, nous avons choisi un moteur à
courant continu (pour modèles réduits), noté
M_delta.
Ceci nous permettait de disposer d'une
raquette de rattrapage à quatre boutons:
- Ouest = alpha
+ (vitesse lente pour moteur synchrone M_alpha)
- Est =
alpha - (vitesse rapide pour moteur synchrone M_alpha)
-
Nord = delta + (commande du moteur continu M_delta avec
polarités + -)
- Sud = delta - (commande du moteur
continu M_delta avec polarités - +)
Du point de
vue pratique, nous avons installé 4 boutons poussoirs sur
la raquette de commande qui actionnent 4 relais:
- relai
(alpha +): commute une grande résistance R pour
l'oscillateur du circuit NE555.
- relai (alpha -): commute une
petite résistance R pour l'oscillateur du
circuit NE555.
- relai (delta+): alimente le moteur M_delta
avec les polarités (+ -)
- relai (delta-): alimente
le moteur M_delta avec les polarités (- +)
Liste
des modifications effectuées sur ce télescope pour le
passage au "numérique":
-
installation d'un moteur à courant continu pour le rattrapage
en déclinaison lors du suivi des objets.
- remplacement de
l'ancien porte oculaire du type "à cabestan", qui
avait l'inconvénient de faire tourner l'image quand on faisait
la mise au point, par un autre modèle à crémaillère
motorisable.
- installation d'un chercheur plus performant, ce qui
était nécessaire pour le centrage des objets avec la
précision requise par le petit champ des caméras
Webcams ou des CCD refroidis.
- et enfin, installation de codeurs optiques sur les deux axes (avec SkyNavigator) : ce n'est pas vraiment nécessaire, mais beaucoup plus confortable!
2. Commande de la raquette par un ordinateur, avec une liaison USB
Le principe de base de l'autoguidage est de commander directement la raquette de rattrapage (alpha+/-, delta+/-) avec un ordinateur. Celle commande peut se faire par l'intermédiaire d'une interface parallèle (très simple, mais malheureusement les ordinateurs modernes ne disposent plus de sortie parallèle) ou avec une interface USB (avec un émulateur de l'interface parallèle). Les premiers systèmes de guidage automatique qui ont été mis en oeuvre il y a une trentaine d'années dans les observatoires professionnels (CERGA, OHP et Pic du Midi) étaient basés sur ce principe, en gardant la possibilité d'utiliser la raquette en cas de problème. La détection de la correction nécessaire pour suivre l'étoile-guide était moins intégrée qu'aujourd'hui. Elle se faisait parfois tout simplement en collant quatre photo-transistors (ou plus) sur l'écran du moniteur de la caméra de guidage. Lorsque l'étoile s'éloignait du centre et éclairait l'un de ces transistors, le (ou les) relais correspondants étaient activés. De nos jours, la visualisation des images issues de la caméra se fait directement sur l'ordinateur, ce qui permet une solution complètement intégrée.
Nous avons donc installé une
interface USB qui permet à un ordinateur d'actionner
aussi les quatre relais (alpha+/-, delta+/-). Pour cela nous
avons fait le choix d'utiliser le module RAVAL USB MOD4
d'Elexol
(basé sur le circuit FTDI 245BM) qui permet d'émuler
très facilement une interface parallèle. La société
FTDI fournit des pilotes D2XX (librairies dynamiques ou DLL)
et une documentation pour utiliser les fonctions correspondantes
(voir FTDI chip. Ces fonctions
permettent d'envoyer des octets sur ce module via la liaison
USB. Les valeurs 0 ou 1 de ces octets sont alors directement lisibles
sur les broches d'entrées/sorties D0, D2, ..., D7 de ce
module, sous forme de 0 ou +5V. Pour commander la raquette, il suffit
donc de relier les broches D4, D5, D6 et D7 (correspondant à
la valeur des derniers bits) à l'entrée des quatre
relais suivants:
- D4 active le relai (Ouest =
alpha +)
- D5 active le relai (Est = alpha -)
-
D6 active le relai (Sud = delta -)
- D7 active
le relai (Nord = delta +)
Nous avons suivi ici la convention
d'Etienne Bonduelle (astrobond.eblxigaf),
mais on peut prendre n'importe quelle autre convention, car la
plupart des logiciels d'auto-guidage s'accommodent de n'importe quel
autre codage. Notons qu'on dispose de quatre entrées/sorties
libres, ce qui permet d'autres applications. Nous envisageons dans
l'avenir d'utiliser cette possibilité pour que l'ordinateur
puisse lire des codeurs de position, et accéder ainsi à
la position du télescope en temps réel (avec
visualisation du champ correspondant sur une carte du ciel).
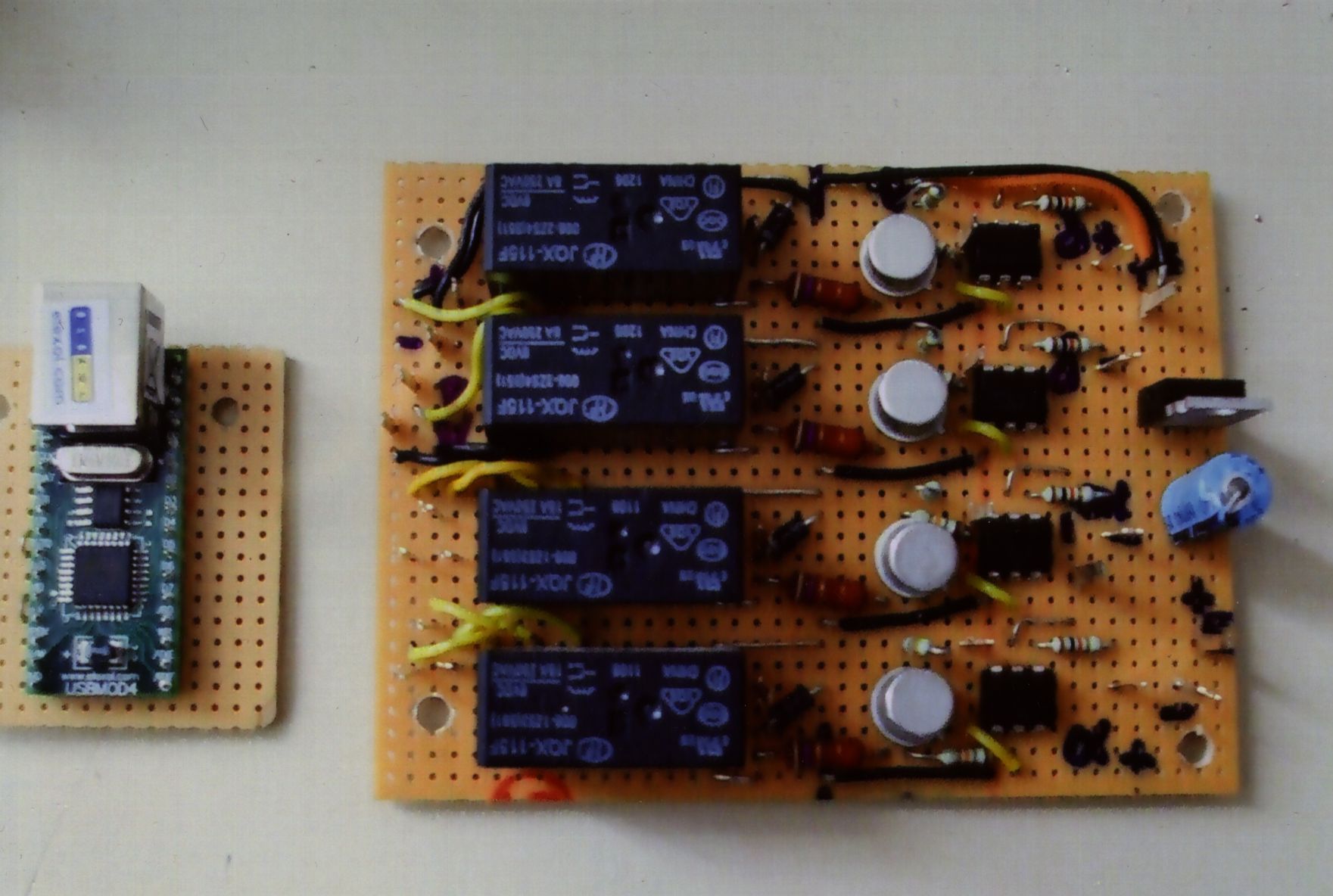
Figure1:
Interface USB/raquette (avant câblage). Le module Ravar
d'Elexol (à gauche) permet la simulation d'un port
parallèle à partir d'une liaison USB. A droite: carte
de commande des moteurs avec les 4 relais pour alpha +, alpha -,
delta + et delta -. Quatre opto-coupleurs (à droite)
permettent un bon découplage avec le signal issu du module
USB. Nous avons monté une alimentation 6V avec un régulateur
(et condensateur) à droite.

Figure
2: Ensemble terminé. De gauche à droite: raquette,
interface USB/raquette, transformateurs et façade d'entrée
(avec le module Ravar d'Exelol). L'ancien circuit générateur
de fréquences pour le moteur synchrone est en haut. Il n'a pas
été modifié.
Ainsi donc cette modification est très simple dans son principe et permet ensuite un guidage automatique avec une webcam et un ordinateur portable en utilisant des logiciels d'autoguidage "standards" et un vieux télescope, ce qui ne paraissait pas évident au départ. Nous sommes très redevables envers l'excellente page web de Stéphane Ubaud (Interface d'autoguidage) qui nous a donné l'idée de cette transformation et dont les schémas nous ont servi de point de départ. En fait d'autres solutions sont possibles, le principe étant simplement que l'ordinateur doit actionner les quatre relais de la raquette de commande.
Pour ceux qui n'ont pas beaucoup de temps libre, il existe aussi des produits finis, comme par exemple le module USB d'autoguidage de Pierro Astro,
Quelques détails de la réalisation:
- Il faut installer les DLLs du driver D2XX Direct pour que le circuit FTDI 245BM puisse être reconnu et utilisé dans le mode "Bit Bang" par les logiciels de guidage tels que GuideDog et Astro-Snap. En installant ensuite un driver ASCOM pour cette liaison USB en émulation port parallèle, ces programmes fonctionnent directement avec notre interface. Par exemple, avec le driver USB-EQ ASCOM disponible sur le site de Pierro Astro, il suffit alors de choisir "USB Autoguider Interface" dans le menu ASCOM du "choix du télescope".
- Un des relais en déclinaison est inhibé lorsque l'autre est activé (le raccord à la masse se faisant par l'autre relai). Ceci permet d'éviter un court-circuit qui apparaîtrait lorsque, par erreur, on active ces deux relais, soit en appuyant sur les deux boutons delta+ et delta- de la raquette, soit en envoyant D6 (rappelons que la commande du moteur continu dans les deux sens se fait par (+ -) et (- +)). Notons que ce genre de problème n'existe pas pour la commande du moteur synchrone utilisé en ascension droite.
- Sur la façade d'entrée nous avons installé 4 leds qui indiquent les corrections demandées en ascension droite et déclinaison (avec un interrupteur qui permet de les éteindre lorsque l'obscurité est nécessaire).
- Nous avons utilisé une configuration du module USB RAVAR où il est alimenté par le PC. Si vous utilisez comme moi un vieux PC portable avec "hub USB2" sur une carte PCMCIA, cela implique qu'il est nécessaire de connecter le fil d'alimentation (livré avec cette carte) entre le port USB1 et ce hub. C'est un détail à ne pas oublier...
- Trois leds (avec interrupteur) sont installées sur la raquette, pour servir de "lampe de poche", ... et pour retrouver la raquette dans le noir!.
Sélection
de liens utiles pour le guidage automatique et la conversion au
"numérique"
Nous présentons ici une sélection de quelques sites que nous avons utilisés pour notre récente adaptation au monde "numérique". Nous les indiquons pour aider ceux qui, comme nous, sont novices dans ce domaine. Bien sûr cette sélection est limitée, sûrement très imparfaite, et ne nous engage nullement. Les fournisseurs notamment ne sont mentionnés qu'à titre indicatif.
Fournisseurs (vente en ligne):
www.astronome.fr :
accessoires et matériel divers pour l'astronomie (Lorient)
www.conrad.fr:
composants électroniques et accessoires pour modèles
réduits (roulements à billes, moteurs, etc)
www.galileo.cc/GALILEO-france/
: accessoires et matériels divers pour l'astronomie (CCD
refroidis) (Bordeaux)
www.laclefdesetoiles.com
— La Clef Des Étoiles - Cosmodiff: accessoires et
matériels divers pour l'astronomie (Toulouse)
www.m42optic.fr:
accessoires et matériels divers pour l'astronomie (CCD
refroidis)
www.maison-astronomie.com:
accessoires et matériel divers pour l'astronomie (Paris)
www.optique-unterlinden.com:
accessoires et matériel divers pour l'astronomie (Colmar)
(catalogue en ligne, mais pas encore de vente en ligne).
www.selectronic.fr:
composants électroniques (dont le module RAVAL MOD4 d'Elexol
nécessaire pour l'interface USB pour l'autoguidage)
Motorisation de télescopes, guidage automatique:
Astronomie pratique:
très bon site de Stéphane Ubaud avec des schémas
électroniques pour piloter le guidage d'un télescope
avec une interface USB (interface
d'autoguidage), qui nous ont servi de point de départ. Il
y a une petite erreur dans la numérotation des pins du module
RAVAR dans son schéma, il faut enlever une unité sur
tous les numéros des broches qu'il indique.
ASCOM:
ensemble de drivers ("programmes pilotes") formant un
standard pour l'interfaçage des télescopes et des
coupoles en astronomie amateur.
Pierro
Astro: site commercial proposant des webcams SCP900 Philips avec
capteur N&B, interfaces divers (USB et parallèle) pour
l'autoguidage, ainsi qu'un driver USB-EQ ASCOM, compatible avec notre
montage.
Variateurs
pour moteurs pas à pas et synchrones: Serge Bertorello y
décrit des schémas de circuits électroniques
pour moteurs pas à pas et moteurs synchrones. Sa virtuosité
dans tous les domaines techniques de son site (Techniques
d'astronome amateur) donne le vertige!
Tutoriel
d'autoguidage: page de Serge Schittly montrant l'utilisation d'
"Astrosnap pro"() avec une interface d'autoguidage USB
émulant un port parallèle. Voir aussi le site d'Etienne
Bonduelle (astrobond.ebtruc)
qui propose un montage électronique compatible avec ce
logiciel.
Camera
concepts: site commercial (USA) fournissant des codeurs optiques
et la raquette SkyNavigator, qui permet un pointage des astres en
mode "Push-To" (c'est-à-dire en orientant
manuellement le télescope en suivant les indications de
SkyNavigator).
Logiciels utiles pour le guidage automatique:
SkyMap
Pro (demo): Logiciel de visualisation du ciel (payant dans sa
version complète, mais il existe une version de démonstration
gratuite). Véritable planétarium, très
puissant.
Astro-Snap:
logiciel (shareware) écrit par Axel Canicio, pour
l'acquisition d'images avec une ou deux webcams, et l'autoguidage.
L'interface est un peu lourde et difficile à comprendre, mais
ce programme offre une multitude de possibilités. Il est
compatible avec l'interface parallèle selon la convention
d'Etienne Bonduelle. Sortie en format AVI (très utile pour
traiter ensuite les images avec d'autres logiciels).
QCFocus:
logiciel (gratuit) simple et efficace pour acquérir des images
avec une webcam, écrit par Patrick Chevalley. Sortie en format
AVI (très utile pour traiter ensuite les images avec d'autres
logiciels). Attention: il faut absolument ne pas compresser les
images dans le film AVI (cela revient généralement à
se limiter à un faible taux d'images/seconde). Ceci est
valable pour tous les logiciels.
Avi2Bmp : logiciel (gratuit) qui permet la sélection des bonnes images dans un film en format AVI, et leur conversion en format "bmp", qui peuvent être ensuite traitées par IRIS par exemple (éditeur: DaanSystems).
GuideDog:
logiciel (gratuit) d'autoguidage avec une webcam, écrit par
Steve Barkes. Simple et efficace. Compatible avec l'interface
parallèle selon la convention d'Etienne Bonduelle.
Attention:
pour l'utilisation sur un système en français, il est
nécessaire de changer le séparateur numérique et
remplacer la virgule par un point, sinon, on a une erreur dès
le lancement du programme, avec le message "Erreur
d'exécution '13': type incompatible". Il faut alors
aller successivement dans Panneau de configuration, Options
régionales et linguistiques, France, et enfin
Personnaliser, puis changer la virgule en point.
RegiStax V4: logiciel (gratuit) de traitement d'images de webcams (écrit par Cor Berrevoets). Accepte le format AVI. Simple et efficace pour le compositage d'images: voir le tutoriel de Christophe Béthune (Traitement avec Registax).
IRIS: logiciel (gratuit) très performant, mais qui demande de l'habitude (écrit par Christian Buil). Accepte maintenant le format AVI: voir le tutoriel de Christophe Béthune (Traitement AVI avec IRIS).
Webcams:
astrobond.ebtruc:
trucs et astuces pour utiliser des webcams, avec de petits moyens, et
obtenir d'excellents résultats! Site d'Etienne Bonduelle.
driver-webcam-Logitech/VC:
driver nécessaire pour utiliser la webcam Logitech/VC sous
Windows/XP.